CV | Google Scholar | Github | LinkedIn
I am a Ph.D. student advised by Professor Hyun Myung at KAIST.
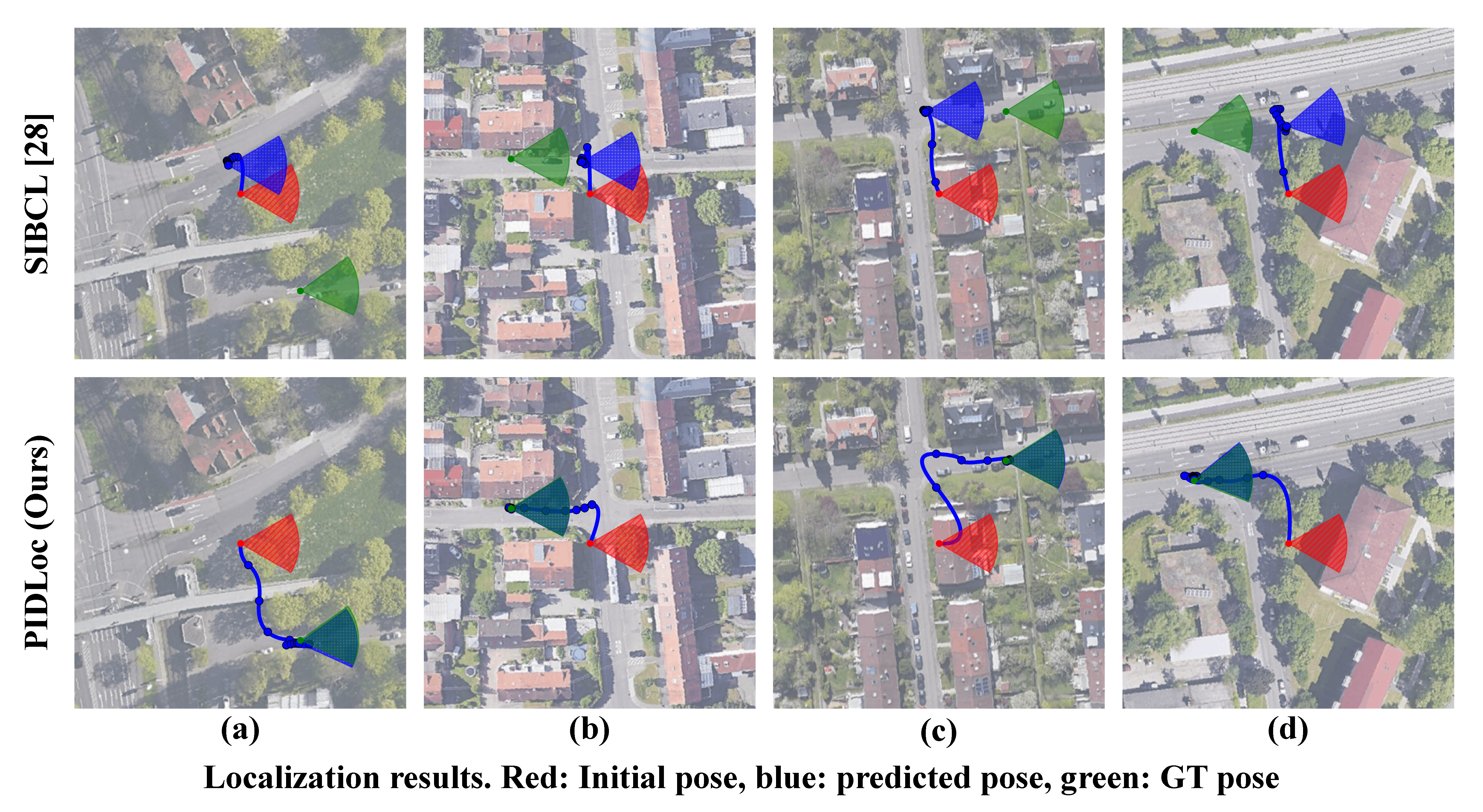
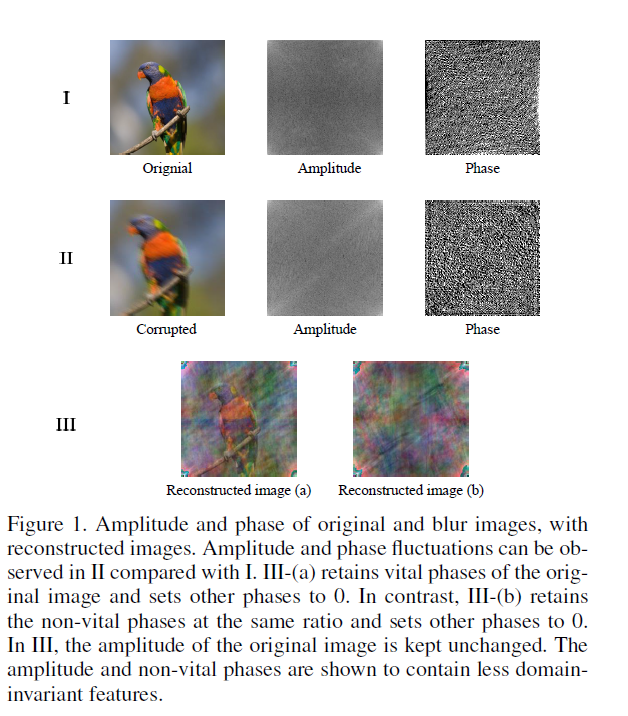
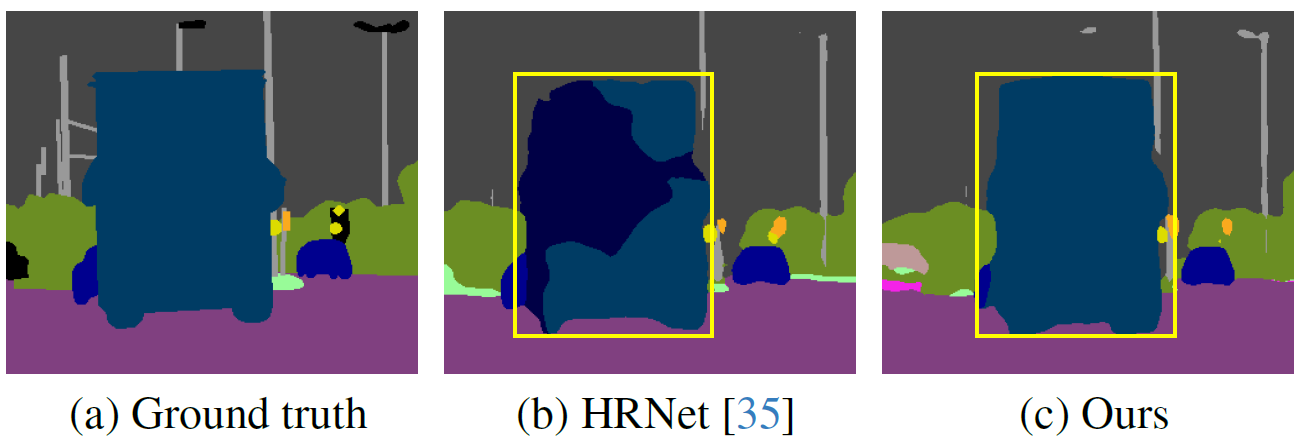
My research interests lie in robust localization and object detection. Developed cross-view geo-localization and domain generalization models to improve localization accuracy under domain shifts. This research contributed to the deployment of autonomous vehicles and robotic systems in real-world environments.
Contact
-
dnwn24 [at] kaist.ac.kr
-
E3-2, 3240, 291 Daehak-ro, Yuseong-gu, Daejeon, Korea, 34141
Education
-
B.S in Mechanical Engineering, 2019
Korea University, Korea
-
M.S in Robotics Program, 2021
KAIST, Korea